爆走!スライムラジコン製作記1 アイデア編

3Dプリンタで単純な印刷ではなく、何か製作したいと思いました。
ラズパイ等を利用して4足歩行等に挑戦し、プログラミングと設計出来るようになりたいところですが、
まだその段階には至ってません。
丁度ドラクエウォークブームだったのでスライムを思いつきました。
スライムなら前進後退、曲がる、ジャンプ、この三つしかないと思うので、
既存のラジコンシステムを利用した初期製作テストとしてまずはスライムを作ってみようと始めました。
今回利用させて頂いたのは既に生産中止となっていますが、
ラジコンメーカーで有名な京商さんのiReceiver(WR-10)を利用させて頂きました。
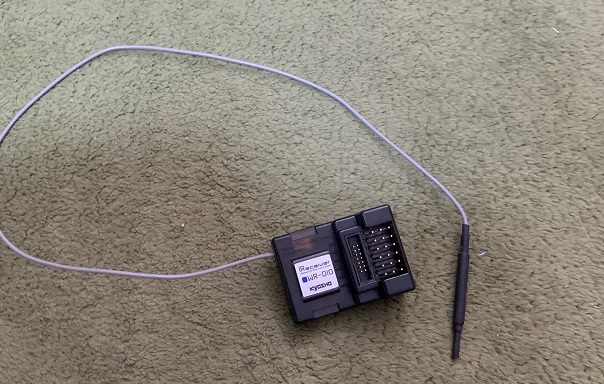
こちらはPWM出力をしてくれるようで、サーボやアンプ(中継)を通してモーターを繋ぎ、
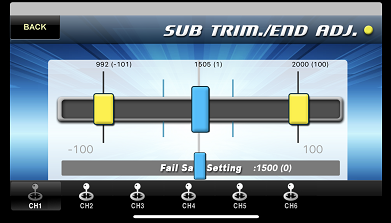
京商さんのiphoneアプリを利用してコントロールできます。
簡単に自作ラジコンが作れます。
6チャンネル(モーター1、サーボ5まで同時接続できる用で)飛行機等への用途にも対応しているようです。
さらにはオプションのカメラユニットもあります。
これ設計次第ではロボットもつくれますよね!
個人的には電子回路や機械工学に精通していなくとも、初心者でも面白いものが作れます。

ちなみに2020/07月現在、ぎんてんはiPhone Xs(Ver13.5.1)を利用していますが、問題なく動作しております。
近所のラジコン屋などで売れ残りを見つけた方は検討してはどうでしょうか?
さて製作記ですが、時系列にだらだら書くと分かりにくそうなので、
今回は
- アイデア編
- 印刷編
- 実製作編
- 実稼働の冒険編(丁度ドラクエだし)
に要点のみで記述したいと思います。
作成の参考に興味ない人は4の冒険編の方だけ見ていただけたらと思います。
作成計画
動作させる部品の選定ですが、
コントロールユニットとしてiRecever 、iReceverへの電源供給とモーター駆動用としてESC(アンプともいうらしいですね)、電値(軽さと大きさの為Lipo使用)、各サーボモーター、駆動としてタミヤ6速ギヤボックスHEを使用しています。
参考
Lipoはラジコン屋さんで、これは小さい!軽い!と買いました。
これはミニドローン用で出力出ないよ動かないよ!とラジコン屋のおやじさんから言われましたが、普通のラジコンを作る訳ではないので自己責任で無理やり買わせて頂きました。

注意 Lipoは発火や爆発の危険があります、今回使用していますがぎんてんもテストや扱いを調べながら慎重に管理して使用しています。使い方を知らない人はマネしないでください。
最低でも駆動としてモーターギヤボックス(タミヤ6速HE)、ステアリング用にサーボ1(SG92R)ですが、スライムの動作イメージとして飛び跳ねがあります。
その為、ジャンプも目標としてサーボ(FSR90R)をもう一つ追加しています。
この組み合わせで配置設計していきました。
その前にギヤボックスですが、組み立てに対して6段階が選べます。
使用部品一式を計って、完成後のPLAの追加重量分も予測して、どれくらいのトルクとスピードを出したいかを考慮して、ギヤボックスの組み立てを決めました。
(組み立てによって駆動軸の取り付け位置が変わる為)
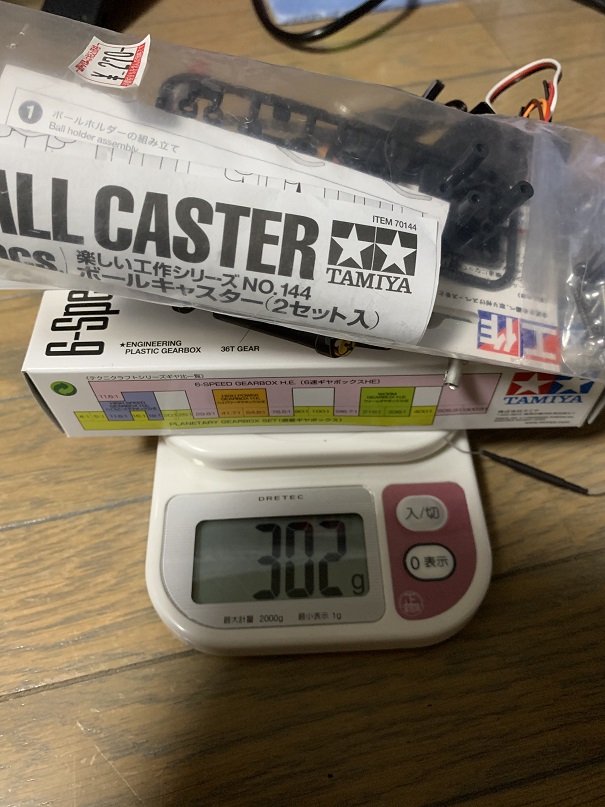
使用部品一式おおよそ302g、それにPLAが追加されたら400~600gってところでしょうか?
| タイプ | ギヤ比 | 回転数 [r/min] | 回転トルク [mN・m] |
|---|---|---|---|
| A | 11.6:1 | 約870 | 約15.8 |
| B | 29.8:1 | 約338 | 約40.7 |
| C | 76.5:1 | 約132 | 約101.2 |
| D | 196.7:1 | 約51.3 | 約235.4 |
| E | 505.9:1 | 約19.9 | ★約226.1 |
| F | 1300.9:1 | 約7.8 | ★約226.1 |
単位変換サイトにて
Bタイプ40.7mN/m → 約415gcm
Cタイプ101.2mN/m → 約1031gcm
耐久も考えると、半分で使うのが望ましいのでCタイプ 1031/2 約500gが適正かも知れませんが。
経験が無いのでこの辺で悩みます。
ホビー利用に関する情報が少ないなぁと。もちろん詳しい工学サイトはありますが微積等を今から読んでも製作は進まないので、別ギヤボックスとなりますがギヤ比の違いを比較した動作のイメージ動画を作ってみました。
参考 ミニモーター多段ギヤボックス(12速)
ギリの範囲までは動作上可能と分かっているので、スピード優先として
今回はBタイプ回転トルク40.7mN/m(415gcm)採用で組み立てました。
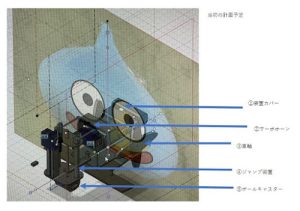
以上を基にしておおよその配置位置として、
- 駆動に関してはギヤボックスから直接歩行を回せば良いので下配置
- iReceiver、ESC、は放熱と下部で駆動の際に何かの衝撃を受けないよう上配置
- 電池は取り外しを考えると下部が望ましいですが、高さをあまりあげたくなかったので余った前配置となりました。
ぬいぐるみを利用する以上、外形のサイズは決まっているので、前後、左右、上下、形状、常に制限があります。
又、駆動部とは別にジャンプ装置と操舵サーボによる独立部として後部に配置しています。
ジャンプ装置は、あくまでも実験中でいくつか考えていますが、今回は回転サーボでスプリングを押し下げ、上に飛び上がる反動で疑似ジャンプを狙いましたが、サーボ程度のトルクではスプリングを十分押し下げるだけのパワーが無く、失敗に終わりもっともらしい形だけ残った形となりました。
ラジコン使用といってもタイヤのような動きは求めておらず、カタンカタンと動くような感じにしたかったので、車輪はあえて4枚羽のような形としました。
爆走!スライムラジコン製作1(自作ラジコン) アイデア編 (当記事)
爆走!スライムラジコン製作記2(自作ラジコン) 3Dプリント編
爆走!スライムラジコン製作記3(自作ラジコン) 製作編
爆走!スライムラジコン製作記4(自作ラジコン) ~廃墟に挑む冒険ストーリー~

コメント